Experimental Validation of Omega 360 Ubiquitous 2D Radar
Rossella Stallone, Seastema SpA
"The innovative nature of the Omega 360 architecture powers the implementation of algorithms capable of exploiting the advantages of the multiple simultaneous beams and their inherent benefits, such as a long time on target and a seamless surveillance. This affects reduction in reaction time after the first target detection, the filtering capability of all types of clutter, and the cancellation of passive and active interferences."
- Rossella Stallone, Seastema SpA
The Challenge:
Seastema needed to develop and validate a ubiquitous 2D radar called Omega 360, capable of a rose of adjacent simultaneous staring beams that drive continuous bi-dimensional coverage of the controlled space, with attention focused on the features of the antenna conformal to a frustum of cone.
The Solution:
The company developed a demonstrator of the radar, capable of verifying digital beam forming (DBF), the pulse compression, and the detection criteria, using NI PXI chassis and modules to generate all radar signals and synchronize the system.
Author(s):
Rossella Stallone - Seastema SpA
Marco Massardo - Seastema SpA
The Need for Ubiquitous Radar
Seastema SpA, a company owned by Fincantieri, designs, develops, and supplies integrated automation systems for different areas of the marine industry. In April 2014, the company established an Innovation Division in Rome to verify the feasibility of an unconventional radar system by means of a demonstrator realized, as much as possible, with commercial off-the-shelf (COTS) devices.
Currently, multifunctional phased array radars (MPAR) are centered around a monostatic architecture based on planar antennas that form a high-resolution single beam in transmission and in reception. Modern MPARs employ Active Electronically Steerable Arrays (AESA) that allow each radar antenna in the system to act as a small computer, giving the radar system a wider range of simultaneously operational frequencies, which makes it harder for opposing systems to detect. However, conventional AESA radars normally scan ±45° so that the entire round angle is covered by means of four faces or by a rotating single face. This implies that the different tasks assigned to them are sequentially fulfilled, leaving a limited amount of time to accomplish dedicated tasks such as low-angle surveillance and tracking very fast and very small targets. The first type of target needs a rapid formation of the track to be counteracted in time. Both types require long observations to be properly extracted from the surrounding clutter. These operational needs require a continuous observation of the interested area, which only staring beams can obtain.
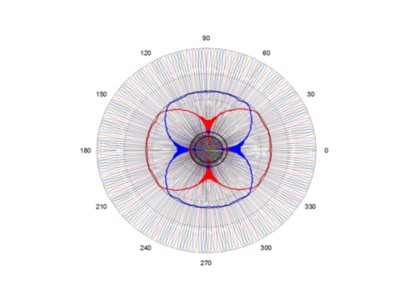
Omega 360 instead realizes a rose of simultaneous staring beams on receive with a single omnidirectional beam on transmit. This solution recalls the concept of “ubiquitous radar” that “looks everywhere all the time,” as described by M. Skolnik.
The architecture is then bistatic in the sense that transmission and reception use different antenna beams. We form the receiving beams by digitally combining the signal received from radiating columns distributed over a frustum of a cone.
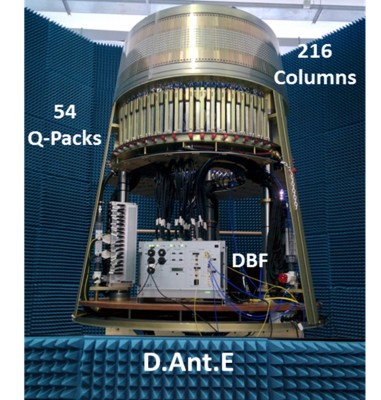
Scientists have realized and assembled a demonstrator of this architecture called D.Ant.E (Digital Antenna Evaluator) (Figure 1) in the laboratory of Seastema Rome where a radar station has allowed full characterization of the staring antenna beam’s features after DBF and pulse compression.
Scientists transferred D.Ant.E to an outdoor test range to verify its performance in a real environment.
Building D.Ant.E on the NI Platform
We designed D.Ant.E with an overall requirement of rapid and reliable detection of small moving targets at low altitude, from extremely high to very slow speed, in severe clutter. Typical targets
to detect include sea skimmer missiles, small boats, periscopes, and drones. We obtained the surveillance feature by means of a group of staring antenna beams formed around a cone. This solution offers very long times on target, so we needed to make the radar capable of selective Doppler filtering with consequent fine separation between real targets and clutter.
D.Ant.E comprises 216 columns of radiating elements evenly distributed along the surface of a frustum of a cone. Each column connects to a receiving channel through which the received RF signal is amplified, filtered, downconverted, and digitally sampled. We physically group the receiving channels by four into 54 modules called Q-Packs. The sampled digital signals in baseband transfer in real time to a central processing unit that applies eight sets of coefficients to obtain eight simultaneous beams.
We used an NI chassis that includes a host computer and a number of specialized modules (Figure 4) to implement all the radar signals and timings. We chose NI because we needed a reliable, configurable, and ready-to-use solution for all the non-innovative aspects.

We selected the PXIe-1085 chassis and the following modules:
- NI PXI Express controller to command and control all modules in the chassis
- PXI Vector Signal Generator module to generate the IF signal
- PXI Timing and Synchronization Module to generate the sampling and system clocks and route all radar timings
- PXI-7841 device to generate all radar timings
- PXIe-5654 to generate the Stable Local Oscillator (STALO) signal
- PXIe-6592 to acquire the beams after digital beamforming, perform pulse compression, and transmit the elaborated data to the PC processor by means of optical fiber
The IF signal is upconverted to the X band (in the frequency range 9-10 GHz) thanks to an upconversion unit, amplified by means of a solid-state power amplifier module, and then transmitted. We use the sampling clock by Q-Packs to sample the received signal and by DBF to synchronize Q-Pack data links. The system clock constitutes the time base of the entire demonstrator. The unit is locked by a 10 MHz reference oscillator.
We can control the NI chassis remotely with a radar management computer (RMC) that allows the choice of all the operative parameters of the test to be done. The RMC also controls the radar processor, console, and tracker units. We took advantage of NI training and technical support to help tailor the system software to our specific needs.
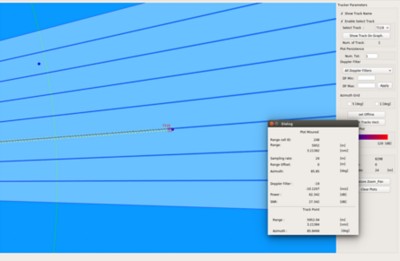
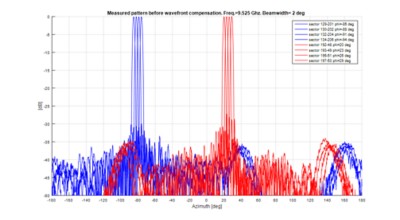
During the experimental validation in our laboratory in Rome, we presented the DBF output, after pulse compression, in real time on a display and recorded it for analysis. We obtained the beams through a digital combination of the signals received by the columns when an RF chirp waveform is transmitted by a horn and the antenna platform is mechanically rotating in a sector from -180 to 180 degrees with a sampling step of 0.2 degrees (see Figure 5).
On the outdoor test range, we focused attention on the verification of the detection capabilities of standard targets immersed in the sea clutter. This required the identification of a dedicated setting of all the radar variables pertaining to the detection thresholds, to plot extraction and the tracking algorithms. Because the radar is almost completely digital, the adopted COTS hardware and software solutions have demonstrated their efficacy as far as the possibility of monitoring the signal flow along the processing chain and the easiness for the variable setting. Figure 6 shows a track acquired during a test with a cooperating target. Each plot includes a label associated with extracted data such as 2D coordinates, radial velocity, and strength.
Results
The experimental results confirm that the innovative nature of the Omega 360 architecture powers the implementation of algorithms capable of exploiting the advantages of the multiple simultaneous beams and their inherent benefits, such as a long time on target and a seamless surveillance. This affects reduction in reaction time after the first target detection, the filtering capability of all types of clutter, and the cancellation of passive and active interferences.
Introducing Sea Omega 360
The results obtained with the D.Ant.E demonstrator in laboratory first, and then on a real environment, confirm the validity of this “ubiquitous” approach. Based on this, we configured a product called Sea Omega 360 that supports the anti-sea skimmer missile defense of modern vessels.
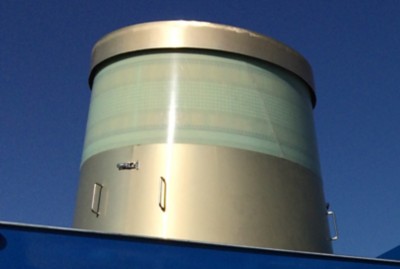
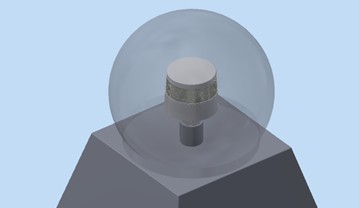
The Sea Omega 360 configuration, unlike D.Ant.E, concentrates the antenna gain on the horizon to maximize the rapidity and reliability of the detection of small moving targets at low altitude, from extremely high to very slow speed and in severe clutter typical of the naval environment. These include sea skimmer missiles, small boats, periscopes, and drones. This has required the modification of the solid of rotation from a frustum of cone to a cylinder (see Figure 7). We foresee installing on the top of a mast at a height that can permit sufficient optical visibility on the horizon and provide a stabilization mechanism for pitch and roll compensation. A spherical radome (see Figure 7) fulfils the double need of protection of the hardware from atmospheric injuries and creation of an ambient suitable for on-the-mast maintenance. Seastema SpA firmly believes that the Sea Omega 360 system can integrate the surveillance capabilities of a modern ship with outstanding performance against surface and low angle threats at a competitive price with other existing systems.
Author Information:
Rossella Stallone
Seastema SpA